CWGrasp: 3D Whole-Body Grasp Synthesis with Directional Controllability
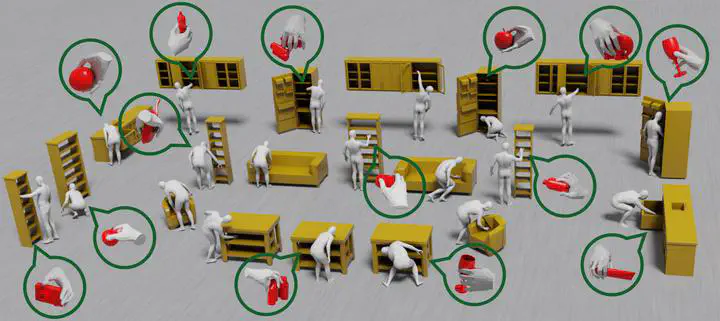 Teaser: CWGrasp Framework Overview
Teaser: CWGrasp Framework OverviewAbstract
Synthesizing 3D whole bodies that realistically grasp objects is crucial for animation, mixed reality, and robotics.
Key challenges include natural coordination between hand, body, and environment, and the scarcity of training data.
CWGrasp overcomes these by performing geometry-based reasoning early: we sample a ReachingField (a probabilistic
direction field around the object), then condition both the grasping hand (CGrasp) and the reaching body (CReach)
on this direction, and finally run a lightweight optimization to resolve penetrations.
CWGrasp handles both left- and right-hand grasps, runs ~16× faster than exhaustive baselines (e.g., FLEX),
and outperforms them on GRAB and ReplicaGrasp datasets.
Code and models: https://gpaschalidis.github.io/cwgrasp.
Teaser
3DV 2025

We develop **CWGrasp**, a framework for synthesizing 3D whole-body grasps on objects placed on receptacles. By integrating early geometry-based reasoning (ReachingField) with controllable synthesis, we achieve realistic grasps at a fraction of the cost compared to prior art.
Method Overview

- ReachingField: Ray-cast from the object to build a probabilistic direction field.
- CGrasp & CReach: Generate a hand and a body guided by the sampled direction.
- Optimization: Resolve penetrations with a fast joint refinement.
ReachingField
Low-height
Medium-height
High-height
CGrasp & CReach

CGrasp: Controllable hand synthesis following the direction.

CReach: Directional body reaching synthesis.
Optimization Comparison
CWGrasp Optimization
FLEX Optimization
Qualitative Results: Right-Hand
Low-height Object
CWGrasp
FLEX
Medium-height Object
CWGrasp
FLEX
High-height Object
CWGrasp
FLEX
Qualitative Results: Left-Hand
Binoculars
Camera
Hammer
Lightbulb
Wineglass
BibTeX
@inproceedings{paschalidis2025cwgrasp,
title = {{3D} Whole-Body Grasp Synthesis with Directional Controllability},
author = {Paschalidis, Georgios and Wilschut, Romana and Antić, Dimitrije and Taheri, Omid and Tzionas, Dimitrios},
booktitle = {International Conference on 3D Vision (3DV)},
year = {2025},
}
Omid Taheri
PostDoc Researcher | Open to Research Scientist Roles
Building Digital Humans that move, interact, and reason like Real Humans – bridging generative AI, vision-language models, and physics-based simulation.